CSCI 363 Computational Vision--Spring 2023
Assignments
Home | | Schedule | | Assignments | | Lecture Notes
Assignment 4, Due Thurs, March 23
In this assignment, we will work with several different algorithms for computing stereo disparity-- Marr-Poggio, Marr-Poggio-Grimson and a correlation algorithm that you will write yourself. These algorithms make use of constraints for matching features in the left and right images, such as continuity and similarity.
Files needed for this assignment
The M-Files and images that you need for this assignment are contained in thecsci363/assignments/assign4 directory. Copy these files into your own assign4 directory.
In MATLAB, set your
Current Directory to the assign4 folder. Final submission details are given
at the end of this handout.
Problem 1: The Marr-Poggio stereo algorithm
In this problem you will implement the Marr-Poggio stereo algorithm and see how it computes
stereo disparity for a random dot stereogram over repeated iterations using the four constraints discussed in class.
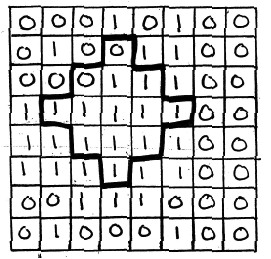
First, run the script, stereoScript, to create a random dot stereogram of concentric
circles at different disparities. The center circle is closest to the observer, and each wider circle is a little
further back, so it looks like viewing a wedding cake from above. The stereogram is shown two ways--as a left and
right image of random white and black dots, and as a red-green stereo pair (anaglyph). Use the red-green glasses
in lab to view the red-green image to see the "cake." You can see how the stereogram is created by viewing the
functions, makeCake.m and makeStereogram.m
Now you will complete the function, final_net = coopStereo(left, right, minD, maxD, iters)
to implement the Marr-Poggio algorithm. In this function the left and right parameters
specify the left and right stereo images. minD and maxD specify the minimum and
maximum disparities used in the stereogram and iters is the number of iterations the algorithm
should be run. Write your code using the following steps:
- Open the function file, called
coopStereo.m - Create two new 3D arrays (
net1andnet2filled with zeros. The dimensions should have the same x, y dimensions as the input stereogram and the third dimension equal to the disparity range. - Write a nested for loop to initialize the network,
net1, by stepping through all the rows and columns and disparities. The value innet1should be set to 1 if left(i, j) is equal to right(i, j + disp).Leave 2 rows of zeros at the top and the bottom of net1, and dRange columns of zeros on the left and right side of
net1Note that the second value is the column number, so it indicates horizontal position.
Also note that when the disparity is the minimum disparity, the index of the third dimension is one, so you will have to take that into account to make sure the correct position in the array is initialized.
- The next set of nested for loops is used to iterate through the algorithm. For each iteration, they loop through all rows, columns and disparities. Your job is to compute the positive and negative support at each position and then test to see if the network should have a 1 or a zero in the next iteration.
- First, compute the positive support by adding together the values in all the neighboring positions at
the current disparity. The pattern of neighbors to add in is shown below.
- Second compute the negative support by adding together all the other possible matches. These are the places
where there is a one at the same (x,y) position and a different disparity:
net1(i, j, disp), or at a position along a diagonal through that position:net1(i, j+d-disp, disp).Use a for loop to add together all the ones in these positions from disp = 1 to dRange.
Subtract out two times the value of the current position: net1(i, j, d)
- Test to see if the total support is greater than the threshold and set corresponding net2 value to 1 if the total support is greater than threshold and zero if it is not. Total support is computed as the current value in net1 plus the positive support minus epsilon times the negative support.
When you are done, you can test your algorithm by uncommenting the last two lines of stereoScript.m, and
running that script. This will run 5 iterations of your algorithm. You should see the concentric circles
emerge.
Hand in: A hard copy of coopStereo.m with your assignment 4 and upload the code file to Canvas.
Problem 2: The Marr-Poggio-Grimson Multi-resolution Stereo Algorithm
In class, we discussed a simplified version of the MPG multi-resolution stereo algorithm
and performed a hand simulation of this algorithm on the board. This problem provides
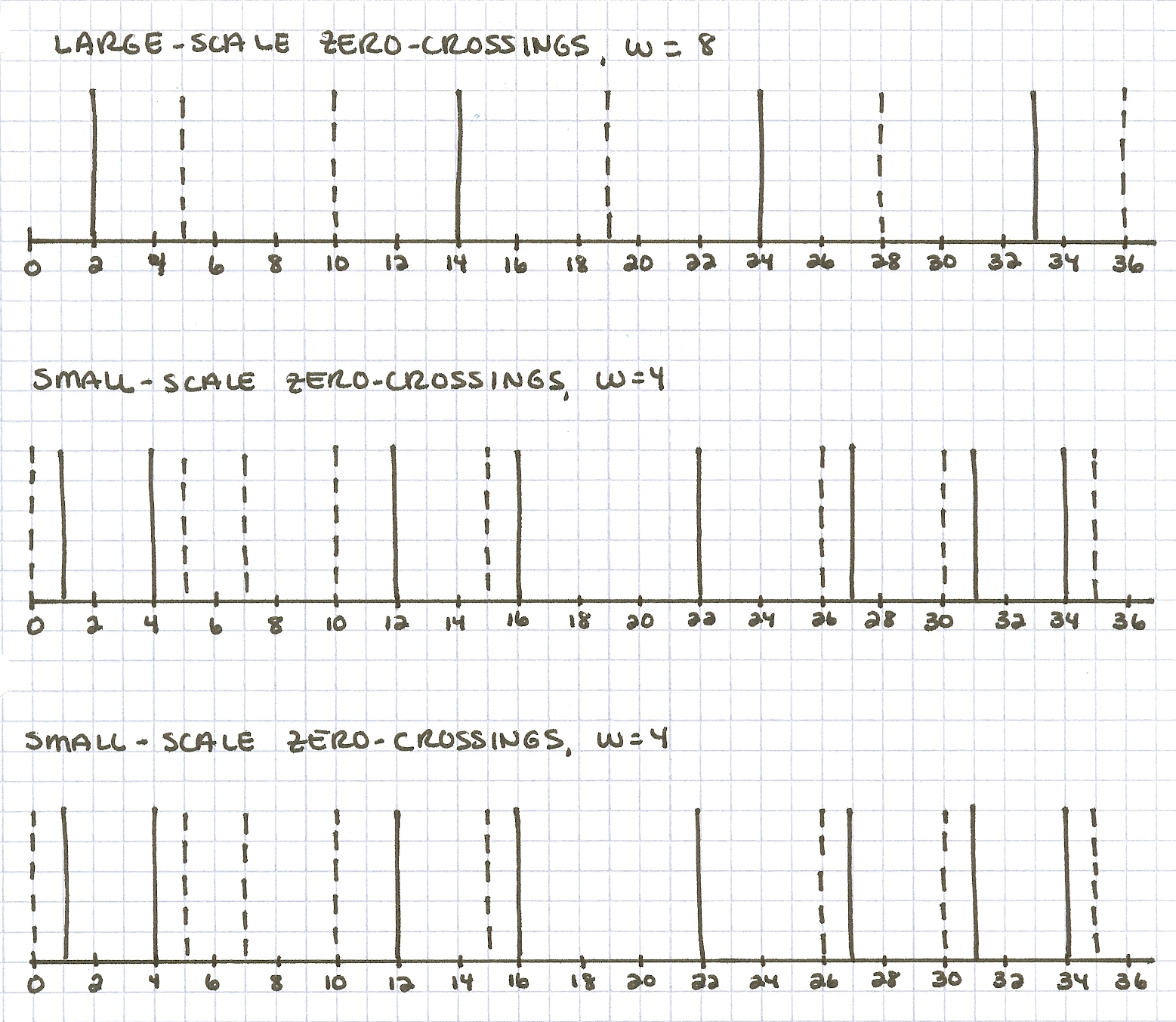
another example for you to hand simulate on your own. The zero-crossing pictures are shown
below. The top row shows zero-crossing segments obtained from a Laplacian-of-Gaussian
operator whose central positive diameter is w = 8, and the bottom two rows
show zero-crossing segments obtained from an operator with w = 4. Assume
that the matching tolerance m (the search range) is m = w/2. In
the diagram, the solid lines represent zero-crossings obtained from the left image and the
dashed lines are zero-crossings from the right image (assume that they are all zero-crossings
of the same sign). The axis below the zero-crossings indicates their horizontal position in
the image.
Part a: Match the large-scale zero-crossing segments. In your answer, indicate which left-right pairs of zero-crossings are matched and indicate their disparities.
Part b: Match the small-scale zero-crossings, ignoring the previous results from the large-scale matching. In your answer, indicate which left-right pairs of zero-crossings are matched and indicate their disparities. Show your analysis for this case on the bottom row of the figure.
Part c: Match the small-scale zero-crossings again. This time exploit the previous results from the large-scale matching. Show your analysis for this case on the middle row of the figure.
Part d: What are the final disparities computed by the algorithm, based on the matches from Part c? The final disparity is defined as the shift in position between the original location of the left zero-crossings and the location of their matching right zero-crossings.
Part e: One of the constraints that is used in all algorithms for solving the stereo correspondence problem is the continuity constraint. What is the continuity constraint, and how is it incorporated in the simple version of the MPG stereo algorithm that you hand-simulated in this problem?
Problem 3: A Stereo Algorithm Based on Correlation
In this problem, you will implement a stereo correspondence algorithm based on a strategy
known as correlation. The input for this new algorithm will be the zero-crossings
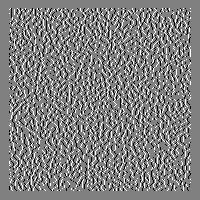
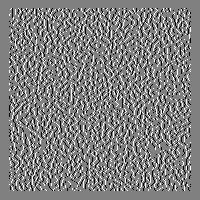
computed by the stereoZeros function given to you. In the
figure below, the top left and right pictures show a
random-dot stereogram with a central square patch that has a disparity of +2
pixels and a background disparity of +1 pixels. The middle left and right
pictures show the zero-crossings obtained from convolving the two images with a Laplacian-of-Gaussian
operator of size w = 4. Positive zero-crossings are shown in white and negative
zero-crossings in black. Your task is to write a function called stereoMatch
that solves the correspondence problem and computes a disparity for each location
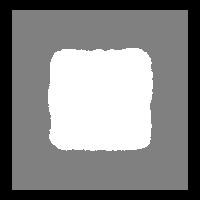
in the left image. The bottom picture in the figure below shows sample results from an
implementation of stereoMatch. The function computed a disparity of
+2 for central locations in the image (displayed in white) and a disparity
of +1 for the surrounding region (displayed as gray). There is a border around
the outside of the image where disparities are not computed (zero values, shown in black).
 |  |
 |  |
 |
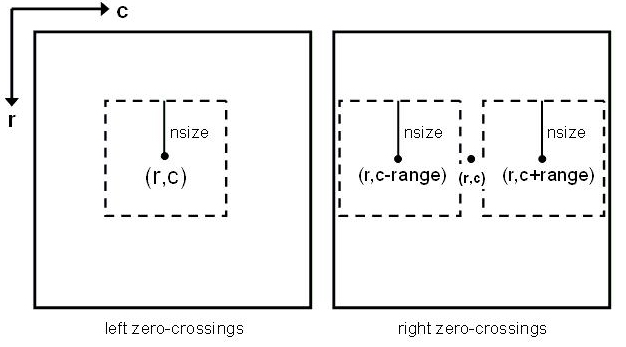
The figure below illustrates the strategy that you should use to solve the stereo
correspondence problem. Assume that the left and right input pictures contain the
zero-crossings derived from the original left and right stereo images. Suppose we
want to compute the disparity at location (r,c) (row r
and column c) in the left picture. Consider a square neighborhood that
extends nsize pixels in the four directions
around location (r,c), as shown in the left picture below. To compute a
disparity for this location, your function should search in the right picture for a square
patch of the same size that best matches the content of the left patch. To find the
most similar patch in the right picture, consider a range of possible horizontal positions of
the patch centered on locations (r,c-range) to (r,c+range), as
shown in the right picture below. The horizontal position of the most similar patch in the
right image, relative to the position of the original patch in the left image, determines
the disparity assigned to location (r,c).
For this problem, you
will use a measure of similarity between two patches based on correlation. Correlation is a general
computational technique that arises in many image processing applications and in the
description of models for biological computations. Correlation is similar to convolution.
The picture below shows two small image patches labeled I1 and
I2
that each contain the three values -1, 0 and +1 (similar to a
zero-crossing representation):
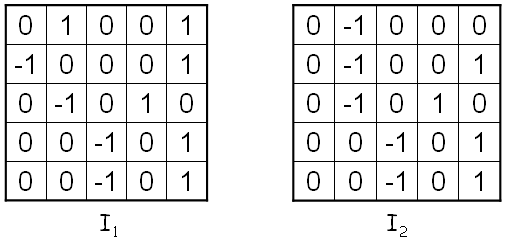
The correlation between the two image patches is defined as:
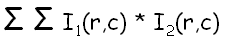
where the summation is performed over the entire 2D region. The values in the two patches are multiplied point-by-point and the products are then summed. For the above images, the pointwise multiplication yields the following intermediate result:
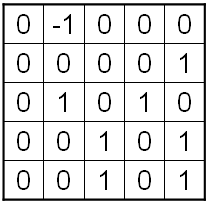
The sum of all of these products is 6. In this simple case where the images
contain only -1, 0 and +1, the pointwise product will be
1 at a location where both image patches contain +1 or both
image patches contain -1. If the two patches contain opposite values at the
same location (i.e. -1 and +1), their product will be
-1. If we now think of the +1 and -1 values in the
input left and right patterns as
representing positive and negative zero-crossings, then this correlation measure effectively
adds up the number of locations that contain zero-crossings of the same sign in the
two image patches, and subtracts the number of locations that contain zero-crossings of
opposite sign in the two patches. Thus, this correlation measure gives a rough indication
of how well the zero-crossings match between two image patches. As the similarity of the
zero-crossings in the two patches increases, the correlation increases. Therefore a patch
in the right pattern that best matches a given patch in the left pattern will have the
maximum correlation value.
As stated earlier, your task is to define a function stereoMatch that uses the
approach described above to solve the stereo correspondence problem. Your function should
have the following header:
function result = stereoMatch (zcleft, zcright, nsize, range)
zcleft and zcright contain the zero-crossings computed with the
stereoZeros function. nsize is the neighborhood size (the results
shown above were computed with nsize = 10), and range is a
positive number that represents the range of disparities considered. The result
matrix should contain double type values and be the same size as the input
zero-crossing matrices. This function should compute a disparity value for every location
where the square neighborhood in the left and right patterns fits within the bounds of
the matrix.
The correlationScript.m file contains
a sequence of statements that create a stereogram (using the chapelLeft.jpg and chapelRight.jpg
images), use the conv2D function to
convolve the left and right images with a Laplacian-of-Gaussian operator (using a value of
w = 4), compute the zero-crossings with the stereoZeros
function, and runs the stereoMatch function to compute disparities, and
display the results.
An operator size of w = 4, disparity range of 6 and neighborhood size
of 10 is used to produce good results.
Run the correlationScript to test your algorithm.
This stereo pair is constructed from a real image (you can see it by typing
chapel = imread('chapelLeft.jpg') and then using imtool(chapel))
and a disparity pattern that conveys a secret message that you can view. If you don't see
a readable message, you have not correctly written your stereoMatch function.
Problem 4: The Correlation-Based Stereo Algorithm
We discussed four constraints that most stereo correspondence algorithms incorporate: uniqueness, similarity, continuity and the epipolar constraint. Explain how the correspondence-based strategy that you implemented in Problem 3 uses each of these four constraints.
Submission details:
- Hand in a hardcopy of your
coopStereo.mandstereoMatch.mcode files - Hand in a hardcopy of your answers to the questions for Problems 1-4.
- Hand in your discussion log
- Upload to Canvas your code files for
coopStereo.mandstereoMatch.m
Home | | Schedule | | Assignments | | Lecture Notes
Constance Royden--croyden@holycross.edu
Computer Science 363--Computational Vision
Last Modified: March 13, 2023
Page Expires: March 13, 2024